UWP(ユニバーサルWindowsプラットフォーム)アプリでArduinoとシリアル通信をするアプリを作ろう!
その為に、まずははじめてのUWPアプリの作成にチャレンジ。
今回はArduinoとの接続を想定しているので、センサ等の情報を画面に反映するようなアプリにしてみよう。
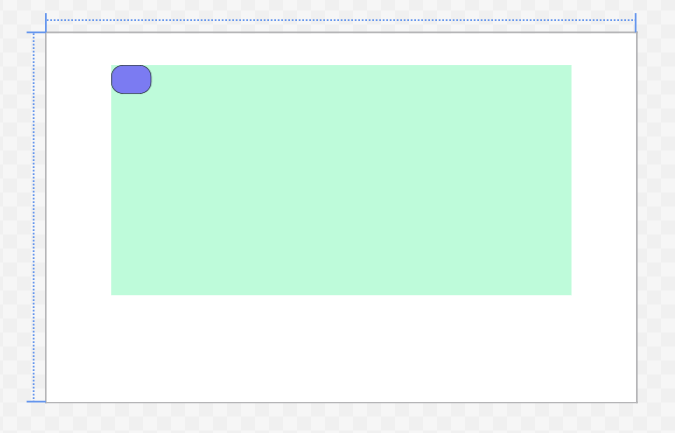
UWPアプリはXAMLでデザインをするようだ。とはいってもVisualStudio2015ではドラッグアンドドロップでコードが生成されていくのでお手軽。まずはCanvasをつくりその中にRectangleを作ってみたら以下のようなコードが生成される。色などはプロパティで選択すればOK。
MainPage.xaml
<Page
x:Class="MyUWP.MainPage"
xmlns="http://schemas.microsoft.com/winfx/2006/xaml/presentation"
xmlns:x="http://schemas.microsoft.com/winfx/2006/xaml"
xmlns:local="using:MyUWP"
xmlns:d="http://schemas.microsoft.com/expression/blend/2008"
xmlns:mc="http://schemas.openxmlformats.org/markup-compatibility/2006"
mc:Ignorable="d">
<Grid Background="{ThemeResource ApplicationPageBackgroundThemeBrush}">
<Canvas HorizontalAlignment="Left" Height="400" Margin="112,54,0,0" VerticalAlignment="Top" Width="800" Background="#FFBEFBDA">
<Rectangle x:Name="Bot_A" Fill="#FF7B7BF2" Height="50" Canvas.Left="0" Stroke="Black" Canvas.Top="0" Width="70" RadiusX="20" RadiusY="20"/>
</Canvas>
</Grid>
</Page>
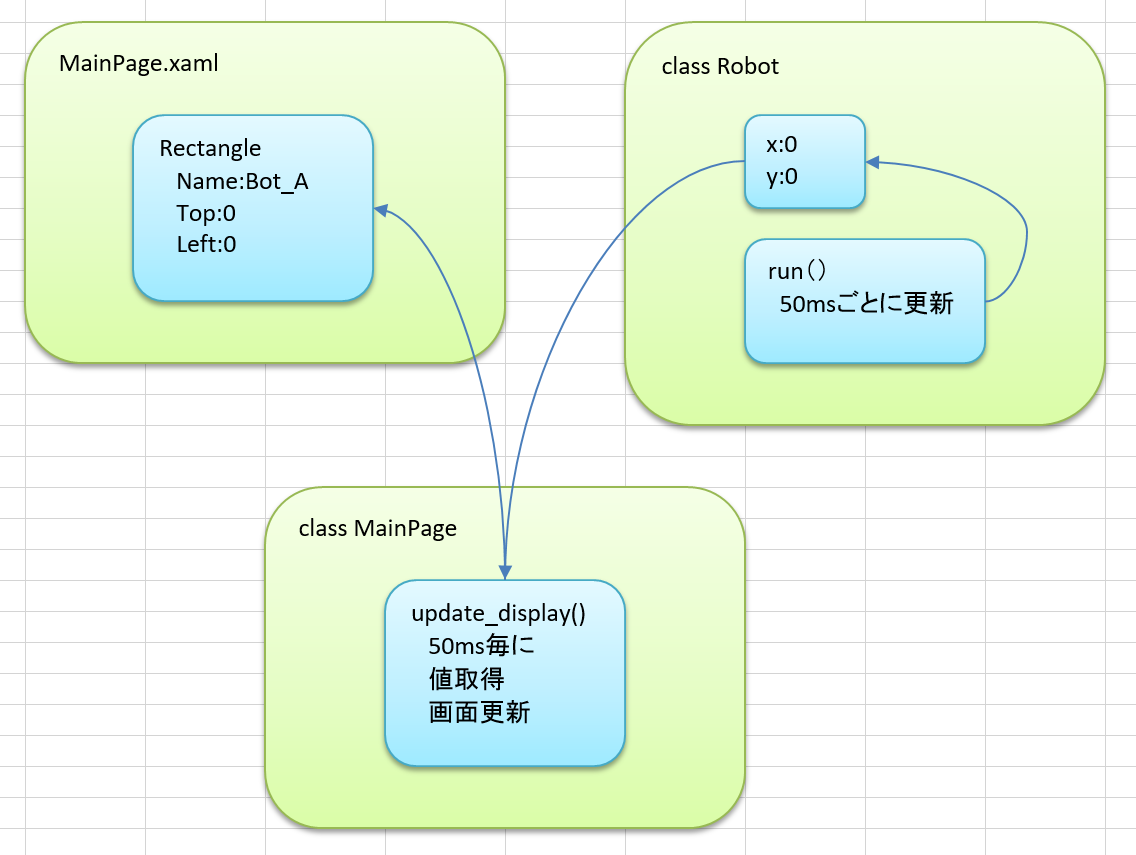
青い角丸四角の位置をプログラムで動かしてみよう。
update_display()という無限ループ関数で角丸四角を動かしてみる。
MainPage.xaml.cs
using System;
using System.Collections.Generic;
using System.IO;
using System.Linq;
using System.Runtime.InteropServices.WindowsRuntime;
using Windows.Foundation;
using Windows.Foundation.Collections;
using Windows.UI.Xaml;
using Windows.UI.Xaml.Controls;
using Windows.UI.Xaml.Controls.Primitives;
using Windows.UI.Xaml.Data;
using Windows.UI.Xaml.Input;
using Windows.UI.Xaml.Media;
using Windows.UI.Xaml.Navigation;
using System.Threading.Tasks;
// 空白ページのアイテム テンプレートについては、http://go.microsoft.com/fwlink/?LinkId=402352&clcid=0x409 を参照してください
namespace MyUWP
{
/// <summary>
/// それ自体で使用できる空白ページまたはフレーム内に移動できる空白ページ。
/// </summary>
public sealed partial class MainPage : Page
{
public Robot robot { get; set; }
public MainPage()
{
this.InitializeComponent();
this.robot = new Robot();
this.robot.run();
update_display();
}
public async void update_display()
{
for(;;)
{
Canvas.SetLeft(Bot_A, robot.x);
Canvas.SetTop(Bot_A, robot.y);
await Task.Delay(50);
}
}
}
}
Robotクラスを作成し疑似的に随時状態が変更されているイメージ。
Robot.cs
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Diagnostics;
namespace MyUWP
{
public class Robot
{
public int x { get; set; }
public int y { get; set; }
public Robot()
{
this.x = 0;
this.y = 0;
}
public async void run()
{
int vx = 1;
int vy = 1;
int ax = 1;
int ay = 1;
Random rnd = new Random();
for (int i = 0; i<20; i++)
{
if (i == 19)
{
ax = rnd.Next(-1, 2); //-1,0,1のどれか
ay = rnd.Next(-1, 2); //-1,0,1のどれか
vx += ax;
vy += ay;
i = 0;
}
this.x += vx;
this.y += vy;
if (x < 0 || x > 730) //端で折り返し
{
vx = -vx;
}
if (y < 0 || y > 350) //端で折り返し
{
vy = -vy;
}
await Task.Delay(50);
}
}
}
}
以下のようなイメージ。
UWPアプリでの画面更新テストアプリ成功。
次回は実際にArduinoとのシリアル通信にトライしよう!
バージョン情報
Visual Studio Community 2015, windows 10
こちらの記事もどうぞ
 2015年7月8日 IFTTTのMaker channelがいい感じ!
2015年7月8日 IFTTTのMaker channelがいい感じ! 2015年3月28日 IoT無線タグTWE-Lite-2525A 使ってみた C#
2015年3月28日 IoT無線タグTWE-Lite-2525A 使ってみた C# 2014年6月17日 無線マイコンTWE-Lite DIPで無線通信。C#編。
2014年6月17日 無線マイコンTWE-Lite DIPで無線通信。C#編。 2014年12月8日 Arduinoシリアル通信 その4:exe化
2014年12月8日 Arduinoシリアル通信 その4:exe化 2014年6月7日 Arduino シリアル通信 その2:visual C#
2014年6月7日 Arduino シリアル通信 その2:visual C#