バージョン情報
Arduino IDE 1.0.6 ,windows 8.1
Amazonでモータドライバを¥350でゲットしたのでArduinoとつないでDCモーターを回してみた。
予備実験
Arduinoにつなぐ前にモータドライバとモータのみで正転・逆転の動作を確認してみた。
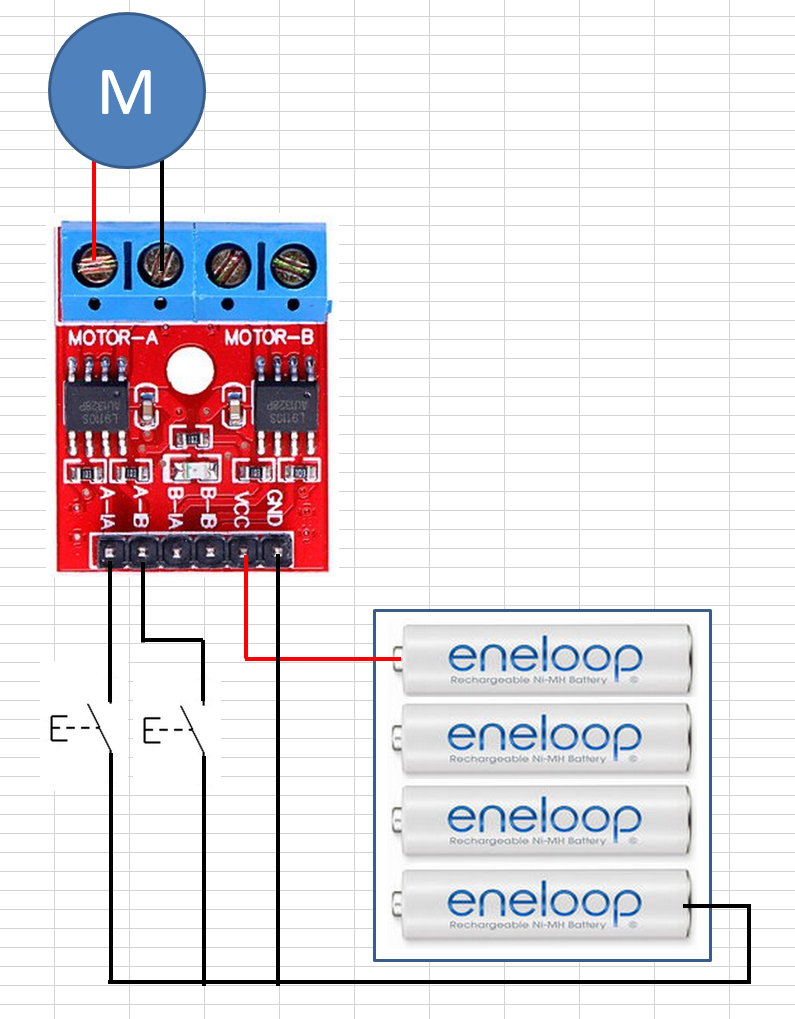
正転スイッチを押すと正転、逆転スイッチを押すと逆転することが確認できた。
材料
Arduino
モータドライバ:L9110S
DCモータ
ボリューム(可変抵抗)
エネループ:4本
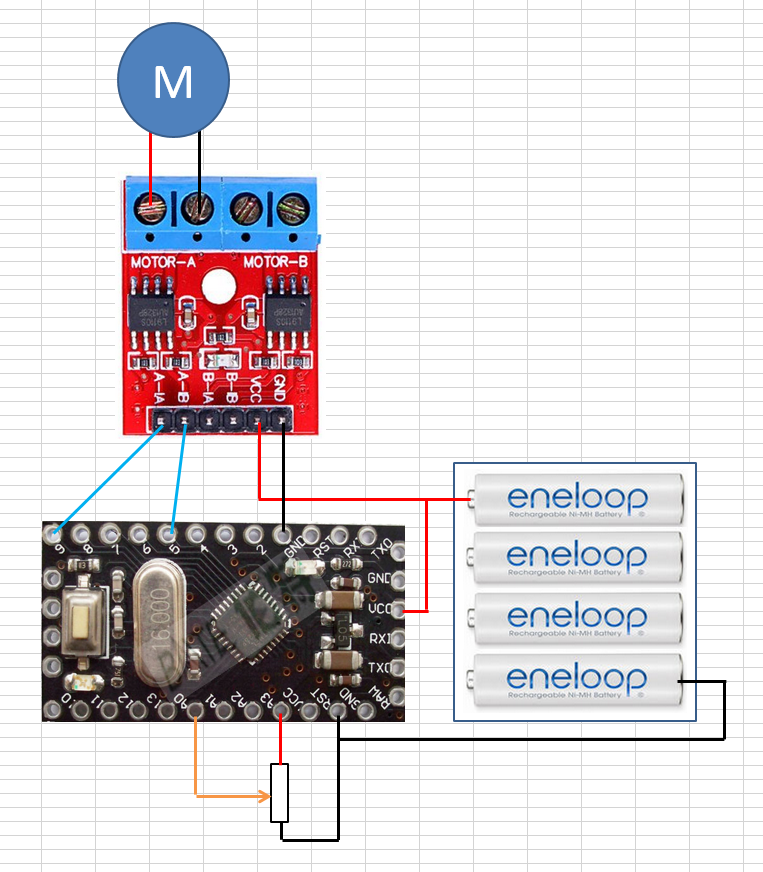
回路
ソースコード
//DCモーター
#define AIN 1
#define M1_A 5
#define M1_B 9
int val = 0;
int out = 0;
void setup() {
pinMode(M1_A, OUTPUT);
pinMode(M1_B, OUTPUT);
}
void loop() {
val = analogRead(AIN) - 512;
if (val < 0){ //正転
out = map(val,-512,0,255,0);
analogWrite(M1_A,0);
analogWrite(M1_B,out);
}else{ //逆転
out = map(val,0,512,0,255);
analogWrite(M1_B,0);
analogWrite(M1_A,out);
}
delay(500);
}
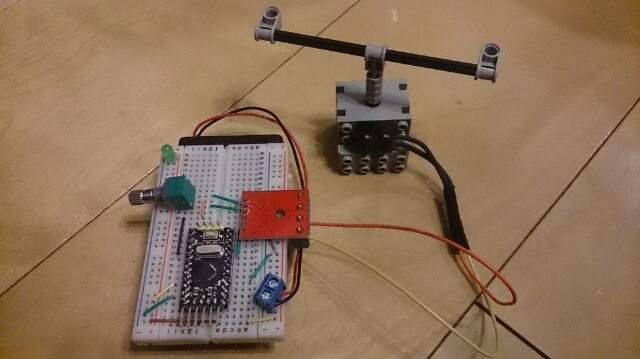
動作確認
ボリュームを回すと回転速度が変動し、正転逆転をきりかえるのも成功!
こちらの記事もどうぞ
 2015年2月6日 3台のArduinoをI2Cで通信してみた
2015年2月6日 3台のArduinoをI2Cで通信してみた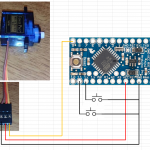 2015年1月24日 Arduino スレーブその2:サーボ
2015年1月24日 Arduino スレーブその2:サーボ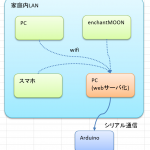 2015年2月26日 IoTの前に、家庭内LAN of things
2015年2月26日 IoTの前に、家庭内LAN of things 2014年6月3日 Arduino シリアル通信 その1:processing 続き
2014年6月3日 Arduino シリアル通信 その1:processing 続き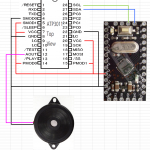 2015年2月18日 Arduinoスレーブその3:音声合成LSI
2015年2月18日 Arduinoスレーブその3:音声合成LSI
初めまして。
古い記事にコメント失礼いたします。
自分はArduino nanoとジョイスティックとモータードライバー等使用して、メカナムホイールの有線制御車両を製作しようとしています。
ですが自分、まだ中学生でプログラミング等習ったりもしておらず、周りに詳しい方もいないので細かく詳しいことがわかりません。自分でネットを使い調べ、ちょっと理解してはコピペでスケッチを完成させてきました。
そこでお力をお貸しいただきたくご相談させてください。
車体そのものは既に完成しております。
三角関数などはまだわからないので、とりあえず簡易的にこの向きにジョイスティックを倒したらこのモーターとこのモーターが動く。という割り当てをしたいです。
ジョイスティックが中立ですと500ほどですが、それを0、両限界点を1000とし、ジョイスティックの倒し具合とモーターの回転数(出力)を比例させるスケッチはどう書けばいいのでしょうか?さらに詳しい点必要でしたらお伝えください。
不躾なのは承知です。ですがもしよければこの際、どうかお力添えをお願いいたします。
コメントありがとうございます。
以下の順序で試してみることをお勧めします。
①ジョイスティックの入力の確認
どの方向にどの程度倒したらどれくらいの入力になるのか
参考:http://shirotsuku.sakura.ne.jp/blog/?p=299
②モータの回転数の変更方法の確認
(モータ・モータドライバの種類により異なる)
・回転方向の変え方
・回転速度の変え方
③、①②がわかれば、変換する計算式もわかるのではないかと思います。