ようやく念願のLEGOラジコンが完成したので遊んでみた。
車両
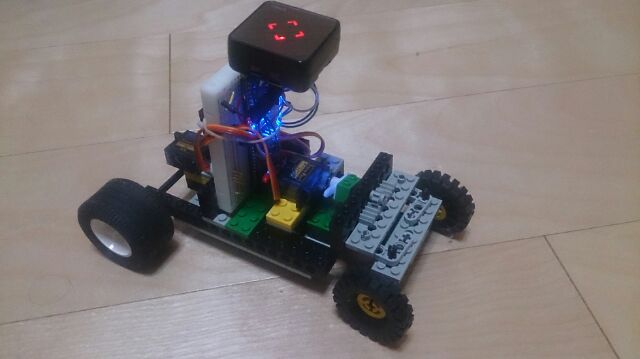
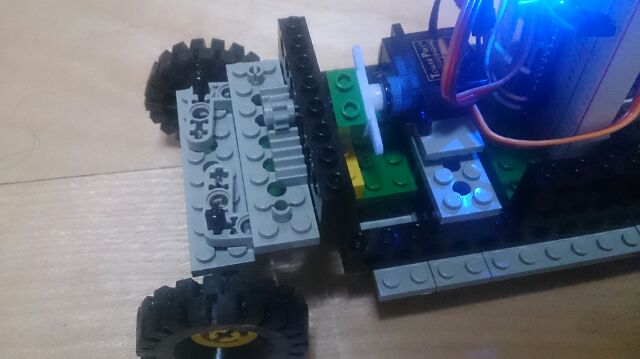
後輪駆動。
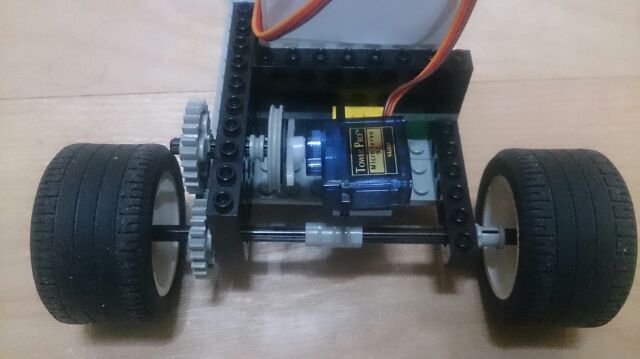
前輪をラックピニオン方式のステアリング。
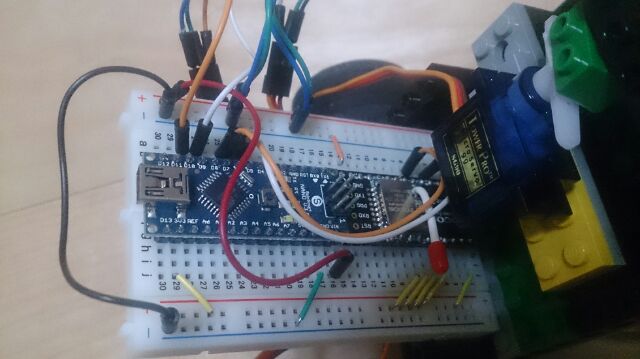
制御方法はArduino + RCサーボモータ。(詳しくは以前の記事)
電源:5V(モバイルバッテリー)
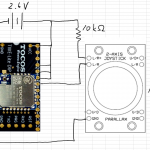
コントローラ

ガムボトルコントローラ。(2CH ジョイスティック)
無線はTWE-Lite Dip。(詳しくは以前の記事)
電源:2.6V(単4エネループ×2)
動作確認
【ソースコード】
#include <Servo.h>
//サーボの設定
Servo myservo_Accel;
int Accel_pin_out = 9;
int Accel_val = 90;
Servo myservo_Steering;
int Steering_pin_out = 10;
int Steering_val = 90;
//入力の設定
int Accel_pin_in = 6;
int Steering_pin_in = 7;
unsigned long Accel_duration = 0;
unsigned long Steering_duration = 0;
void setup() {
myservo_Accel.attach(Accel_pin_out);
myservo_Steering.attach(Steering_pin_out);
pinMode(Accel_pin_in, INPUT);
pinMode(Steering_pin_in, INPUT);
}
void loop() {
//入力
Accel_duration = pulseIn(Accel_pin_in, HIGH, 10000) + 25; //停止状態を微調整
Steering_duration = pulseIn(Steering_pin_in, HIGH, 10000);
//演算
Accel_val = map(Accel_duration, 0, 666, 180, 0) ;
Steering_val = map(Steering_duration, 0, 666, 0, 180);
//出力
myservo_Accel.write(Accel_val);
myservo_Steering.write(Steering_val);
//待ち
delay(15);
}
※TWE-Lite Dipは購入時のままのアプリをそのまま使用。
こんなにお手軽にラジコンが作れるようになるとは驚きだ。
こちらの記事もどうぞ
 2014年8月3日 Arduino nano + TWE-Lite Dip でアナログリモコン(2CH)をつくってみた
2014年8月3日 Arduino nano + TWE-Lite Dip でアナログリモコン(2CH)をつくってみた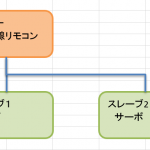 2015年2月6日 3台のArduinoをI2Cで通信してみた
2015年2月6日 3台のArduinoをI2Cで通信してみた 2015年4月3日 Studuino + LEGO + ブザー
2015年4月3日 Studuino + LEGO + ブザー 2015年3月29日 Studuino + LEGO + LED
2015年3月29日 Studuino + LEGO + LED 2015年9月30日 Arduino + RCサーボ でアナログメータをつくってみた
2015年9月30日 Arduino + RCサーボ でアナログメータをつくってみた